はじめに
以下は,三級海技士(航海)の筆記試験 「航海」の電波航法,沿岸航法に関する過去問題です。
※ 出題は,平成28年2月から令和7年2月定期試験まで(10年分)の問題を調べたものです。(類)は,類似の問題を示します。解答は一緒です。平成=H,令和=Rに年/月を数字で示しております。
電波航法
〔問題1〕
外洋から陸岸に接近する場合,レーダー表示面上に陸上物標の映像を初認したとき,船位決定上注意しなければならない事項を述べよ。
【出題:H28/02類,H29/04類,H31/02,R02/04,R3/04】
〔問題2〕
レーダーを使用して船位を求める場合,物標の方位及び距離を測定するときには精度上どのような注意が必要か。
【出題:H29/10(類),R01/10(類),R04/04】
〔問題3〕
レーダーを使用して船位を求める場合,正確に物標の方位及び距離を測定するには,どのような注意が必要か。
【出題:R05/10,R06/07】
レーダーによる船位を求める問題ですね。これは,レーダーの誤差がどの程度かを覚えておく必要があります。まず,レーダーで方位を測るのと,距離を測るのと,どちらが誤差が少ないのでしょうか?これは,忘れてはいけません。距離の方が,方位よりも誤差が少ない!!レーダーによる方位測定には約2度の誤差があります。一方の距離測定の場合は,誤差約2%です。ちなみに視覚によるコンパス方位の誤差は,1%以内程度です。えっ,レーダーの方位の誤差が2度だったら,360分の2で180分の1じゃん,1%未満じゃん,ですって。2度は,角度の誤差であって,遠くになるほど,2度でも距離の誤差が大きくなりますよね。そういうことです。2度の誤差は,一概に%で誤差(測位誤差)を示すことが出来ないのです。そのようなことを踏まえると,測位誤差の少ない順番は,自然に導かれますね。
一方で,遠い物標を使用してレーダー測位を行う場合は,地球が丸いことに注意する必要があります。
レーダーの画面上の近くの物標と遠くの物標がどのように映るかよく考えて答えましょう。
沿岸航法
〔問題1〕
沿岸航行中,方位線の転位による船位測定法(Running fix)により船位を求める場合,正確な船位を得るために注意しなければならない事項を4つあげよ。
【出題:H28/07,H30/02,H30/10,R02/10,R04/02,R05/07,R06/07】
Running fixは,一つの物標を使って,船位を求める方法ですね。まず,最初に物標の方位を測り,一定の方位に一定の船速で走った後,再び同じ物標の方位を測り,船位を求めるというものですね。
注意しなければならないのは,物標をどのように測るか?特に,1回目と2回目をどのような間隔で行うか?
そして,三角形の1辺である,航程について,どのようなことに気を付けなければならないか?Running fixによる船位の決定の原理は,三角形の合同条件の1つの応用です。
それは,「1組の辺とその両端の角がそれぞれ等しい。」というものです。
まあ,ちょっと分かりにくい説明かも知れませんが。1辺とその両端の角が分かれば,船位が求められるというものです。

〔問題2〕
推測位置に外力の影響を加味して船位を推定する場合の注意事項を3つあげよ。
【出題:R02/07】
〔問題3〕
沿岸航行中,予定の変針点付近に達した場合,当直航海士はどのようなことを確認しなければならないか。
【出題:H28/04,H29/10,R01/07,R3/04,R05/04,R06/04】
そうですね。まずは,本当に予定の変針点にあとどのくらいで到達するか確認をしなければなりませんね。
つまり,船位の確認(コースラインからどれだけずれているかも含む)ですね。
次に,このまま変針しても良いか,周囲の状況を確認する必要がありますね。
そして,どの変針目標をどのように見て(予備の変針目標も含む),どのような方向に変針するか(これは変針点に達する前に事前に覚えておく必要があります)再確認します。
さらに,変針を行うために,舵を手動操舵に切り替えなければなりませんね。
これらのことを流れで覚えて,箇条書きで答えられるようになりましょう。
〔問題4〕
沿岸航行中,2つの物体を用い,クロス方位法で船位を求める場合,方位線はどのような交角になるのがよいか。理由とともに述べよ。
【出題:H28/04,H29/07,R02/02,R03/07,R04/10,R05/04,R06/02,R07/02】
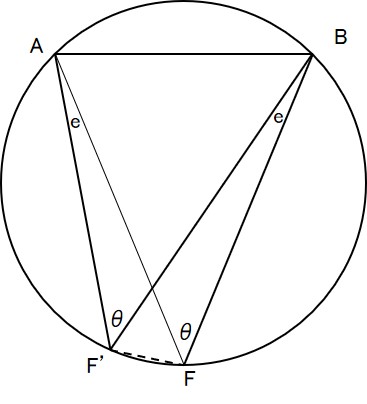
クロス方位法の方位角の交角θ:2物標による場合,θ=90°となる場合が最も良い。少なくとも30°≦θ≦150°の範囲となるようにする。
理由:方位誤差による船位誤差はsinθに反比例するため,θ=90°のとき(sin90°=1)に誤差が最小となる。したがって,θ=90°となるような物標を選ぶことにより誤差を小さくすることができる。
図において、A,Bを2つの灯台の位置とし、Fを真の船位,F’を方位誤差(e)を含んだ船位,θは両物標の方位の差とすると、船位の誤差はFF’となります。
△ABFにおいて
BF/sin(∠BAF) =AB/sinθ ・・・① △BFF’において BF/sin(∠BF′F) =FF′/sin e ・・・②
A,B,F,F’は同一円周上にあるので、円周角の法則から、 ∠BAF=∠BF’F・・・③ ①②③より、 FF′/sin e =AB/sinθ ゆえに、FF′=(AB∙sine)/sinθ
ここで、e(方位誤差)=2°,AB(両灯台の距離)=11マイル,θ(両物標の方位差)=70°を代入すれば、
FF′=(11・sin2°)/sin55°=0.4686 答:0.5マイル